
基于几何优化的激光打标路径孵化算法
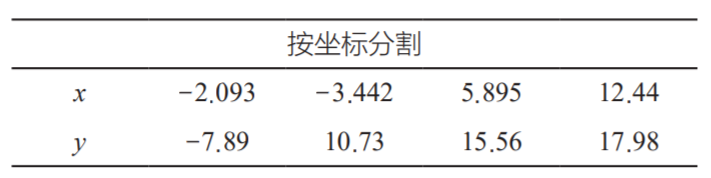
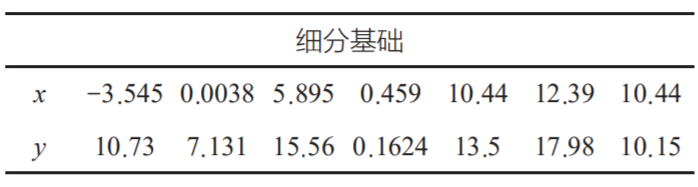
孵化模型。对于锯齿形平行影线,首先分析图形特征,将图形划分为易于处理的点集,对点集做处理,从点集的最低点到最高点递增,计算各层与点集的组成曲线的交点,连接相同高度的交点,最后整合成一个点集并绘制图形。收集轮廓线所有点的坐标,对于其中一个点,使用不规则多边形等距缩减公式计算平移和缩减后的坐标。收集所有点的平移坐标,形成新的点集,然后递归该点集,逐步提出下一个点集,直到不能再递归为止。
激光打标是一种非接触式打标方法。高能激光束聚焦在材料表面,快速蒸发材料并形成凹坑。当激光束在材料表面有规律地移动时,激光同时受到控制。关闭后,激光束会在材料表面加工成特定的图案。与传统的电化学和机械打标方法相比,它具有无污染、高速、高质量、无耗材等优点。国内激光打标经历了大幅面、转镜、振镜等时代。现在主要的工作方式能分为掩模打标、阵列打标和扫描打标。扫描打标是通过计算机平移目标模具表面的 XY 坐标,从而改变激光束到达工件的位置。目前国内主要的研究方向是通过不同的硬件与计算机相结合来增加打标的准确性和效率,但是对提高计算机提供的 XY 坐标的精度和效率的研究还比较浅,本文旨在分析不同平面图形、不同缩进边距和影线间距、不同影线类型下的不同方案的效率,以不同算法所需的标记时间为考虑因素,对这一问题进行研究。
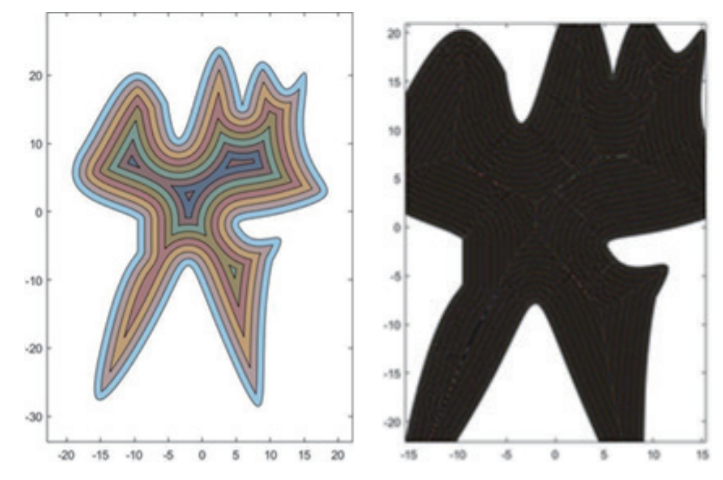
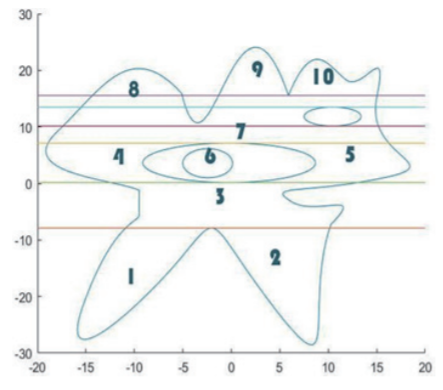
完全平面图形为实心平面图形,内部无凹槽,平面内部连续。在完整的平面图形下,锯齿形平行影线根据同一高度的图形特征将图形分为 7 个区域。在高度h的 条件下求y = h与这部分曲线的交点,连接两个交点,平移h线,对所有切线都可用。根据轮廓形平行影线,先采集点集并计算下一级的点集,然后对点集做处理并归入下一级母集,最后得到所有轮廓线 全平面图形锯齿平行影线 模型原理
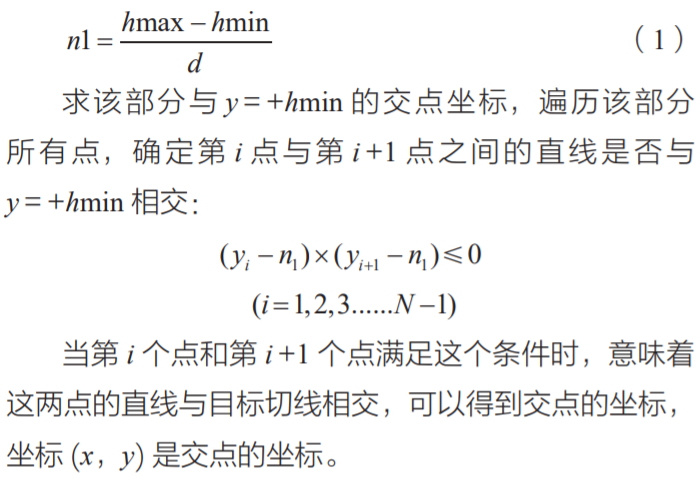
若连接轮廓点集内两点的直线与目标直线相交,则两点的高度与目标切线的高度差的乘积为负。使用这两个点建立一个方程来求解目标切线高度处的交点。与切线高度相连的两点是目标切线。分割后,同一分割线只能与该部分有两个交点。
计算公式得,当缩进线和孵化线(a), 此时激光通过的总长度为 196.4336 mm,切线 条线 秒。
当缩进线(c), 此时激光路径长度为 989.5264 mm,切线 秒 , 两者耗时比为 5.764。
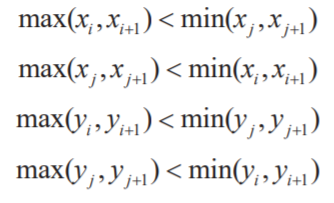
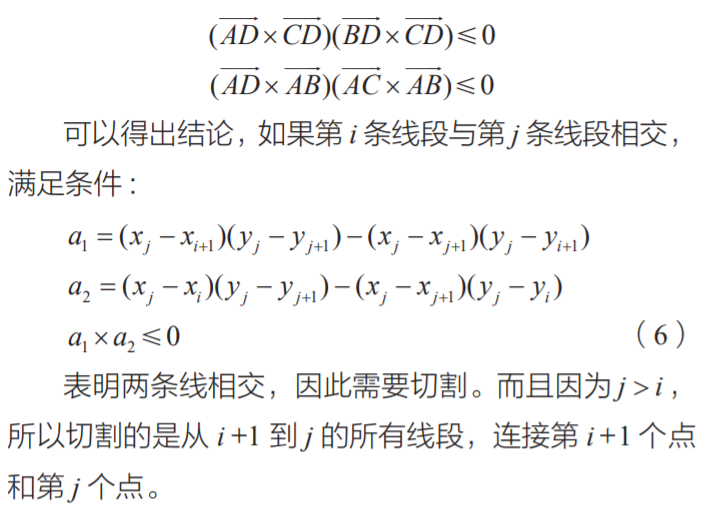
条线段 (ji) 满足以下四条中的一条:则来测试的第二步,利用矢量积的规则,例如:如果 AB 和 CD 相交,那么最后,通过 MATLAB 计算公式得,当缩进线和孵化线 mm 时:激光总光程 896.8205 mm,总圈数 9 圈,算法耗时 0.4624 秒。当缩进线与孵化线 mm 时,由于图像过密仅显示部分内容:激光总长 10 017 mm,总圈数 86 圈,算法耗时 3.6158 秒。到目前为止,两者在该条件下的耗时比为 7.8196。
嵌套平面图形是空心平面图形的一部分,沟槽内部还有别的平面图形,平面不是处处连续的。嵌套平面图形和完全平面图形对于锯齿形平行影线,只是在划分区域上不一样,但对于具有平行轮廓线的影线,这增加了内部空心图形向外扩展的可能性。展开时,展开线和收缩线相交,两条线相交点之间的线段消失,点集可以单独讨论。当两者相交时,可以消去两点之间的所有点得到结果,对于锯齿平行影线,重新定义区分区域。
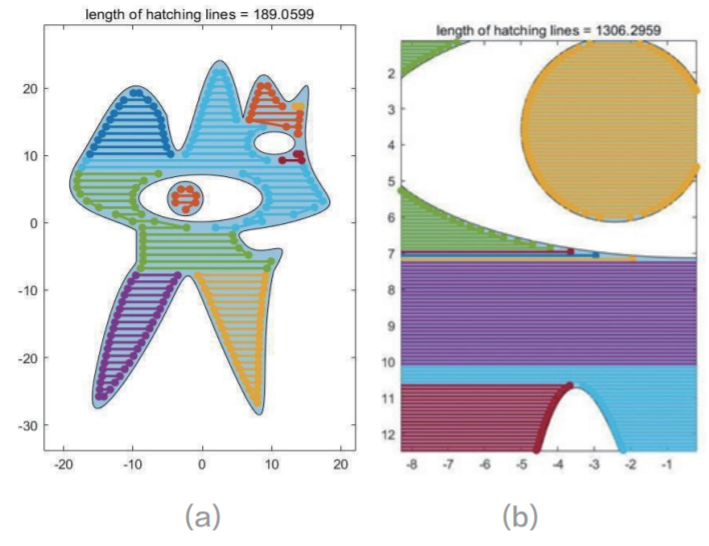
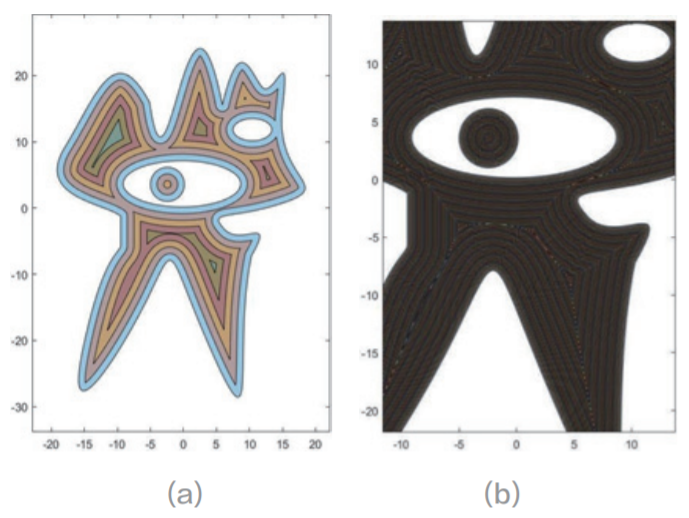
使用模型 1 重新划分计算能够获得结果。当收缩余量与影线 mm 时,此时激光路径长度为 189.0599 mm,总行数为 52,算法耗时 0.0865 秒,如图 6(a) 部分图像。
图6 不同距离切线 mm 时,激光器的总长度为 1 306.3 mm ,总行数为 526。该算法需要 0.4650 秒,两种算法的耗时比为 5.3757。
条线段,如果满足求交公式,则记录交点。因为交点总是成对出现,所以能通过消除同时出现的两个交点之间的点集来求解得到膨胀线和收缩线。当收缩边缘和阴影线 mm 时。此时激光路径总长度为 773.0452 mm,匝数为 6,算法耗时 0.3935 秒。当收缩边距和阴影线 mm 时。此时激光路径长度为 9060.1 mm,总圈数为 60,算法耗时 2.9316。算法耗时比为 7.4501。
当采用轮廓形平行影线时,耗时的算法受影线由此可知,当采用锯齿形平行影线,且内边距与影线 mm 时,在保证算法效率的同时,可以尽可能地保证标记区域。求等高线平行影线时,由于是用无数的点集来模拟曲线,所以会有离散度小带来的误差。可以用逼近曲线来模拟点集所形成的曲线,然后用曲线来计算等距缩减线:
本文对提高孵化效率的研究,可以大幅度提高日常激光打标的工作效率和速度。激光打标孵化算法的研究对于工业应用中生产效率的提高也起到了一定的作用,因为激光打标会产生大量的等高线数据,怎么样处理这一些数据,提高孵化效率,这就是本研究的意义所在。锯齿形平行阴影有助于提供图像定位问题的良好示例,例如激光标记和像素排列。模型 1 能够给大家提供像素定位,这可以为计算机视觉的发展提供一个实用的算法,也可以为量子定位科学技术的其他需求提供一个研究方向。
模型 2 可以为一些科学软件提供升级解决方案。在一些绘制图形的工程软件中,常常使用闭合线收缩。该模型可以为此提供更准确的闭合线收缩方案,保证工程图纸的准确性。参考文献:
[4] 彭川来.基于两步法纹理映射的曲面零件激光打标技术探讨研究[J].山西大同大学学报(自然科学版),2021,37(04):14-16.